Some of our Hackers have projects of their own that they are working on, to possibly submit to BT Young Scientists or elsewhere. Last Saturday, those people were focused on working on their own project, with occasional help from peers or mentors where needed.
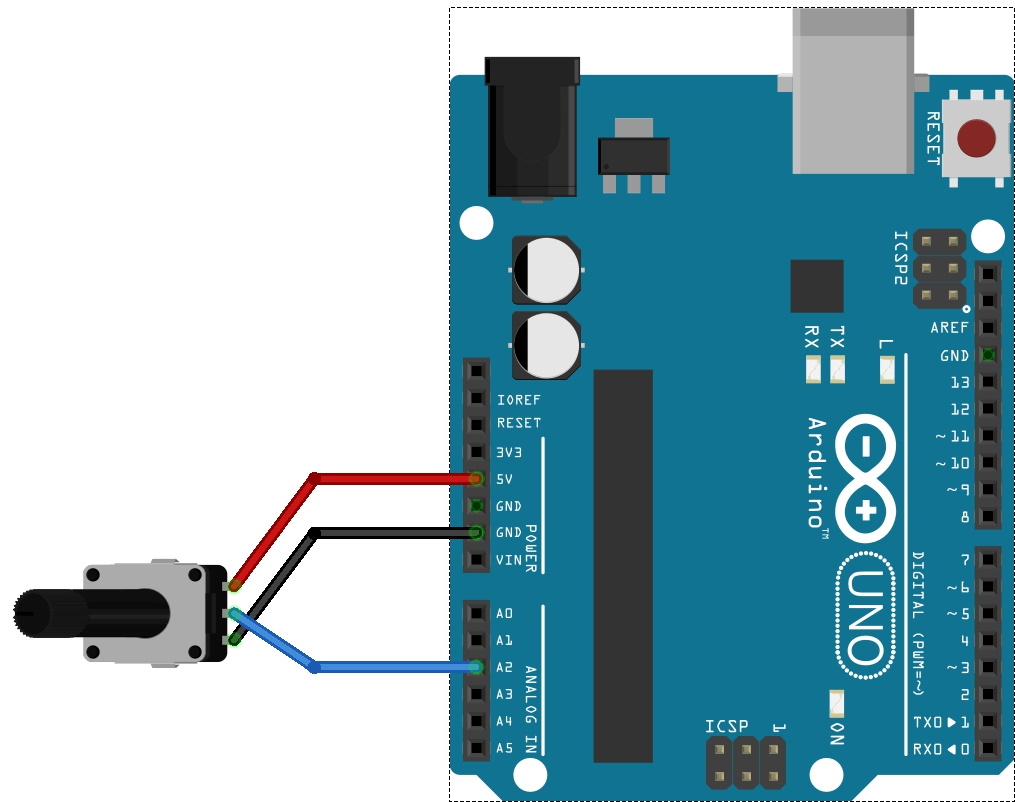
Those who were not working on their own projects extended last week’s Arduino project to add an ultrasonic distance sensor, replacing the variable resistor that they used last week.
Ultrasonic distance sensors are interesting: like sonar in a submarine or how bats navigate, they send out a short sound pulse (ultrasonic – too high for humans to hear) and then see how long it takes for an echo to come back. Since the speed of sound in air is known, we can calculate the distance to the nearest object based on the time for the round trip.
Here is a good tutorial on how it works: https://howtomechatronics.com/tutorials/arduino/ultrasonic-sensor-hc-sr04/
Above is a circuit designed by mentor Kevin for an ultrasonic distance sensor and a buzzer, to work like a car parking sensor that beeps faster as you get closer to an obstacle.
Below is Kevin’s Arduino program to control the distance sensor and print out the distance. Some people in the group modified this to use buzzers, others turned on 1, 2 or 3 LEDs depending on distance. #
const int triggerPin = 12;
const int echoPin = 10;
// The speed of sound in air at standard temperature and pressure is 343m/s.
// The range of the sensor is 4m. It takes 2*4/343 seconds for an ultrasonic
// pulse to travel that far and back.
// We'll use that as a timeout later. There's no point in waiting any longer
// than the time it takes to read an object at the maximum range of the sensor.
unsigned long echo_timeout = 2*4000000/343;
void setup() {
Serial.begin(9600);
pinMode(triggerPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
unsigned long duration;
float distance;
// Begin by resetting the distance sensor
digitalWrite(triggerPin, LOW);
delayMicroseconds(2);
// Write out a short pulse for 10 microseconds
digitalWrite(triggerPin, HIGH);
delayMicroseconds(10);
digitalWrite(triggerPin, LOW);
// pulseIn will wait for the input on echoPin to go HIGH. Then it will
// time how long it takes to go LOW.
// The duration in microseconds is returned.
// We'll wait, at most, echo_timeout microseconds for a pulse.
duration = pulseIn(echoPin, HIGH, echo_timeout);
Serial.print("duration = ");
Serial.print(duration);
Serial.print(" microseconds; ");
// Convert duration to distance. Note decimal point here, needed to get floating point calculation.
distance = duration * 343.0 / 1000 / 2;
Serial.print("distance = ");
Serial.print(distance);
Serial.println(" mm");
}